Traiettoria
La traiettoria è il luogo geometrico delle posizioni assunte dal centro di massa di un corpo in moto. In meccanica classica è in generale una curva continua e derivabile nello spazio euclideo tridimensionale. Può essere ricavata a partire dalla legge oraria, separandola nelle equazioni parametriche nel tempo delle tre coordinate estrinseche, mentre non è possibile il contrario poiché nella traiettoria non sono presenti informazioni sulla velocità.
Indice
1 Coordinate intrinseche cartesiane
1.1 Versore tangente
1.2 Versore normale
1.3 Versore binormale
2 Curvature estrinseche
2.1 Curvatura normale
2.2 Avvitamento geodesico
2.3 Equazione di Lancret
3 Note
4 Voci correlate
5 Altri progetti
Coordinate intrinseche cartesiane |
Può essere spesso utile esprimere la traiettoria in modo autoreferenziale nel triedro fondamentale, composto dai vettori di Frenet tridimensionali ottenuti successivamente dal versore tangente col procedimento di ortogonalizzazione di Gram-Schmidt:

Un sistema di Frenet in tre dimensioni e il relativo piano osculatore evidenziato
Versore tangente |
Viene definito come appartenente alla tangente alla traiettoria, cioè la sua approssimazione al prim'ordine, con verso quello di percorrenza.
- t¯=ds¯ds.{displaystyle {bar {t}}={frac {mathrm {d} {bar {s}}}{mathrm {d} s}}.}

Parametrizzare naturalmente la curva s¯{displaystyle {bar {s}}}
t¯=ds¯dtdsdt=s¯˙s˙=s¯˙∗{displaystyle {bar {t}}={frac {frac {mathrm {d} {bar {s}}}{mathrm {d} t}}{frac {mathrm {d} s}{mathrm {d} t}}}={frac {dot {bar {s}}}{dot {s}}}={dot {bar {s}}}^{*}},
e l'azione cinematica[1] S, definita intensiva (propria cioè di un corpo di massa unitaria che la percorra) e unicamente cinetica, se la traiettoria è naturalmente parametrizzata diventa uguale alla semidurata del moto:
S∗(s)=12∫t0t0+Δt(s¯˙∗)2dt=12∫t0t0+Δtt¯2dt=Δt2{displaystyle {mathcal {S}}^{*}(s)={frac {1}{2}}int _{t_{0}}^{t_{0}+Delta t}({dot {bar {s}}}^{*})^{2},mathrm {d} t={frac {1}{2}}int _{t_{0}}^{t_{0}+Delta t}{bar {t}}^{2},mathrm {d} t={frac {Delta t}{2}}}.
Versore normale |
Comincia ora l'ortogonalizzazione: poiché però ds{displaystyle mathrm {d} s}

- n¯=(d2s¯)n(d2s)n=d2s¯−(d2s)tt¯|d2s¯−(d2s)tt¯|=d2s¯−(d2s¯⋅t¯)t¯|d2s¯−(d2s¯⋅t¯)t¯|{displaystyle {bar {n}}={frac {(mathrm {d} ^{2}{bar {s}})_{n}}{(mathrm {d} ^{2}s)_{n}}}={frac {mathrm {d} ^{2}{bar {s}}-(mathrm {d} ^{2}s)_{t}{bar {t}}}{|mathrm {d} ^{2}{bar {s}}-(mathrm {d} ^{2}s)_{t}{bar {t}}|}}={frac {mathrm {d} ^{2}{bar {s}}-(mathrm {d} ^{2}{bar {s}}cdot {bar {t}}){bar {t}}}{|mathrm {d} ^{2}{bar {s}}-(mathrm {d} ^{2}{bar {s}}cdot {bar {t}}){bar {t}}|}}}

Se s¯{displaystyle {bar {s}}}
n¯=s¯¨ns¨n=t¯˙−t¯˙tt¯1−cos2ϕt˙,t=t¯˙−t¯˙tt¯sinϕt˙,t=s¯¨−s¯¨ts¯˙sinϕs¨,s˙{displaystyle {bar {n}}={frac {{ddot {bar {s}}}_{n}}{{ddot {s}}_{n}}}={frac {{dot {bar {t}}}-{dot {bar {t}}}_{t}{bar {t}}}{sqrt {1-cos ^{2}phi _{{dot {t}},t}}}}={frac {{dot {bar {t}}}-{dot {bar {t}}}_{t}{bar {t}}}{sin phi _{{dot {t}},t}}}={frac {{ddot {bar {s}}}-{ddot {bar {s}}}_{t}{dot {bar {s}}}}{sin phi _{{ddot {s}},{dot {s}}}}}}.
I versori tangente e normale generano un piano, chiamato piano osculatore Πtn{displaystyle Pi _{tn}}
- Πtn:=Span(t,n){displaystyle Pi _{tn}:=mathrm {Span} (t,n)}

Velocità e accelerazione appartengono a questo piano:
- Πtn=Span(ds¯,d2s¯)=Span(s˙¯,s¨¯)=Span(v¯,a¯){displaystyle Pi _{tn}=mathrm {Span} (mathrm {d} {bar {s}},mathrm {d} ^{2}{bar {s}})=mathrm {Span} ({bar {dot {s}}},{bar {ddot {s}}})=mathrm {Span} ({bar {v}},{bar {a}})}

Versore binormale |
Ovviamente sarebbe possibile anche in questo caso definirlo con l'ortogonalizzazione. Essendo però il caso di interesse tridimensionale, il terzo elemento della base è anche semplicemente definibile:
- b¯=t¯×n¯=t¯×d2s¯−(d2s¯⋅t¯)t¯|d2s¯−(d2s¯⋅t¯)t¯|=t¯×d2s¯−t¯×(d2s¯⋅t¯)t¯|d2s¯−(d2s¯⋅t¯)t¯|=t¯×d2s¯|d2s¯−d2(d2s¯⋅t¯)t¯|{displaystyle {bar {b}}={bar {t}}times {bar {n}}={bar {t}}times {frac {mathrm {d} ^{2}{bar {s}}-(mathrm {d} ^{2}{bar {s}}cdot {bar {t}}){bar {t}}}{|mathrm {d} ^{2}{bar {s}}-(mathrm {d} ^{2}{bar {s}}cdot {bar {t}}){bar {t}}|}}={frac {{bar {t}}times mathrm {d} ^{2}{bar {s}}-{bar {t}}times (mathrm {d} ^{2}{bar {s}}cdot {bar {t}}){bar {t}}}{|mathrm {d} ^{2}{bar {s}}-(mathrm {d} ^{2}{bar {s}}cdot {bar {t}}){bar {t}}|}}={frac {{bar {t}}times mathrm {d} ^{2}{bar {s}}}{|mathrm {d} ^{2}{bar {s}}-mathrm {d} ^{2}(mathrm {d} ^{2}{bar {s}}cdot {bar {t}}){bar {t}}|}}}

Se s¯{displaystyle {bar {s}}}
- b¯=t¯×t¯˙sinϕt˙,t=s¯˙×s¯¨sinϕs¨,s˙{displaystyle {bar {b}}={frac {{bar {t}}times {dot {bar {t}}}}{sin phi _{{dot {t}},t}}}={frac {{dot {bar {s}}}times {ddot {bar {s}}}}{sin phi _{{ddot {s}},{dot {s}}}}}}

Va aggiunto notevolmente che se il versore si mantiene costante nel sistema di riferimento considerato, lo fa anche il piano osculatore: il moto si definisce allora piano.
- db¯dt=0¯→dΠtndt=0{displaystyle {frac {mathrm {d} {bar {b}}}{mathrm {d} t}}={bar {0}}rightarrow {frac {mathrm {d} Pi _{tn}}{mathrm {d} t}}=0}

Curvature estrinseche |
Sono curvature piane legate ad un sistema di riferimento esterno alla curva, e non definibili in un sistema solidale alla curva. Risolvendo l'equazione differenziale vettoriale del prim'ordine chiamata Formula di Frenet-Serret a tre dimensioni:
- [∂t¯∂n¯∂b¯]/∂s=[0κ0−κ0γ0−γ0][t¯n¯b¯]{displaystyle {begin{bmatrix}partial {bar {t}}\partial {bar {n}}\partial {bar {b}}\end{bmatrix}}/{partial s}={begin{bmatrix}0&kappa &0\-kappa &0&gamma \0&-gamma &0\end{bmatrix}}{begin{bmatrix}{bar {t}}\{bar {n}}\{bar {b}}\end{bmatrix}}}

Formalmente, il Teorema fondamentale delle curve afferma nel caso tridimensionale che date le curvature estrinseche:κ∧γ:[a,b]→R3{displaystyle kappa land gamma :[a,b]to mathbb {R} ^{3}}![{displaystyle kappa land gamma :[a,b]to mathbb {R} ^{3}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/04742fe5d3b7482a3ac6cc69ada073b9536cbf42)


Se valgono inoltre per la prima equazione scalare della formula di Frenet:
- ∂s¯∂s=t¯{displaystyle {frac {partial {bar {s}}}{partial s}}={bar {t}}}
- ∂2s¯∂s2=∂t¯∂s=κn¯{displaystyle {frac {partial ^{2}{bar {s}}}{{partial s}^{2}}}={frac {partial {bar {t}}}{partial s}}=kappa {bar {n}}}
- ∂3s¯∂s3=∂(κn¯)∂s=∂κ∂sn¯+κ∂n¯∂s=∂κ∂sn¯+κγb¯−κ2t¯{displaystyle {frac {partial ^{3}{bar {s}}}{{partial s}^{3}}}={frac {partial (kappa {bar {n}})}{partial s}}={frac {partial kappa }{partial s}}{bar {n}}+kappa {frac {partial {bar {n}}}{partial s}}={frac {partial kappa }{partial s}}{bar {n}}+kappa gamma {bar {b}}-kappa ^{2}{bar {t}}}



Ma allora[2]:
- ∂s¯∂s×∂2s¯∂s2⋅∂3s¯∂s3=∂s¯×∂2s¯⋅∂3s¯∂s6=κb¯⋅(∂κ∂sn¯+κγb¯−κ2t¯)=κ2γ{displaystyle {frac {partial {bar {s}}}{partial s}}times {frac {partial ^{2}{bar {s}}}{{partial s}^{2}}}cdot {frac {partial ^{3}{bar {s}}}{{partial s}^{3}}}={frac {partial {bar {s}}times partial ^{2}{bar {s}}cdot partial ^{3}{bar {s}}}{{partial s}^{6}}}=kappa {bar {b}}cdot left({frac {partial kappa }{partial s}}{bar {n}}+kappa gamma {bar {b}}-kappa ^{2}{bar {t}}right)=kappa ^{2}gamma }

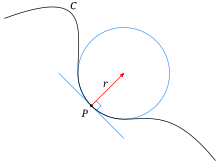
Il cerchio osculatore
Curvatura normale |
Dalla prima equazione della formula di Frenet:
- κ=∂t¯∂sn¯=dstds,{displaystyle kappa ={frac {partial {bar {t}}}{partial s}}{bar {n}}={frac {mathrm {d} s_{t}}{mathrm {d} s}},}

Inoltre dalla relazione subito sopra che lega le curvature solo nelle prime due derivate:
- κ=|∂s¯∂s×∂2s¯∂s2|(=|∂s¯×∂2s¯|∂s3)=|t¯×∂t¯∂s|{displaystyle kappa =left|{frac {partial {bar {s}}}{partial s}}times {frac {partial ^{2}{bar {s}}}{{partial s}^{2}}}right|left(={frac {|partial {bar {s}}times partial ^{2}{bar {s}}|}{{partial s}^{3}}}right)=left|{bar {t}}times {frac {partial {bar {t}}}{partial s}}right|}

Costituisce allora un'approssimazione di second'ordine della curva indirettamente sotto forma del circonferenza osculatrice Κ, per definizione:
- K∈Πtn,K′(s)=t¯,ρ=rK=1|κ|.{displaystyle mathrm {K} in Pi _{tn},quad mathrm {K} '(s)={bar {t}},quad rho =r_{mathrm {K} }={frac {1}{left|kappa right|}}.}

Il luogo dei suoi centri CΓ, detti di curvatura è l'evoluta della traiettoria.
Nei punti di massima curvatura locale il cerchio osculatore non è mai secato dalla traiettoria.
Avvitamento geodesico |
Dall'ultima equazione della formula di Frenet:
- γ=−∂b¯∂sn¯=dsbds,{displaystyle gamma =-{frac {partial {bar {b}}}{partial s}}{bar {n}}={frac {mathrm {d} s_{b}}{mathrm {d} s}},}

Inoltre dalla relazione che lega le curvature in tutte e tre le derivate:
- γ=∂s¯×∂2s¯⋅∂3s¯(∂s¯×∂2s¯)2=∂3scosϕ∂3s¯,∂s¯×∂2s¯|∂s¯×∂2s¯|{displaystyle gamma ={frac {partial {bar {s}}times partial ^{2}{bar {s}}cdot partial ^{3}{bar {s}}}{(partial {bar {s}}times partial ^{2}{bar {s}})^{2}}}={frac {partial ^{3}squad cos phi _{partial ^{3}{bar {s}},partial {bar {s}}times partial ^{2}{bar {s}}}}{|partial {bar {s}}times partial ^{2}{bar {s}}|}}}

Costituisce un indice dell'aplanarità del moto, anche sotto forma della circonferenza d'avvitamento Γ, per definizione:
- Γ∈Πtb,Γ′(s)=t¯,σ=rΓ=1|γ|.{displaystyle Gamma in Pi _{tb},quad Gamma '(s)={bar {t}},quad sigma =r_{Gamma }={frac {1}{left|gamma right|}}.}

Nel moto piano è nulla non avendo lo spostamento una componente binormale: il piano osculatore rimane per tutto il moto unico, ed è quindi rinominabile piano del moto, un moto elicoidale che è unico lungo tutto il moto: il piano osculatore si sposta di moto uniforme, in particolare rettilineo poiché la binormale mantiene la propria orientazione costante.
Equazione di Lancret |
Si può definire anche una terza curvatura, sintesi delle precedenti poiché definita come:
- ξ=dsnds{displaystyle xi ={frac {mathrm {d} s_{n}}{mathrm {d} s}}}

Vale ovviamente il Teorema di Pitagora per via dell'ortogonalità della base (il triedro fondamentale)[3]:
- dsn2=dst2+dsb2{displaystyle {mathrm {d} s_{n}}^{2}={mathrm {d} s_{t}}^{2}+{mathrm {d} s_{b}}^{2}}

E quindi vale l'equazione detta di Lancret:
ξ2=κ2+γ2{displaystyle xi ^{2}=kappa ^{2}+gamma ^{2}}.
Note |
^ il nome è giustificato in quanto le sue geodetiche per massa costante sono le Equazioni di Lagrange
^ Coxeter 1969, p. 322
^ Kreyszig, E. Differential Geometry. New York: Dover, p. 47, 1991
Voci correlate |
- Vettori di Frenet
- Vettore di Darboux
- Orbita
- Equazione di Whewell
- Equazione di Cesaro
- Clotoide
- Quantizzazione della traiettoria
- Principio di indeterminazione di Heisenberg#Interpretazioni
Altri progetti |
Altri progetti
- Wikizionario
- Wikimedia Commons
 Wikizionario contiene il lemma di dizionario «traiettoria»
Wikizionario contiene il lemma di dizionario «traiettoria»
 Wikimedia Commons contiene immagini o altri file su traiettoria
Wikimedia Commons contiene immagini o altri file su traiettoria


