Elicottero

Un elicottero Mil Mi-28
L'elicottero (dal greco: ἕλιξ [helix], spira, spirale, e πτερόν [pterón], ala) è un tipo di aeromobile adibito al trasporto di persone e cose per usi civili e militari. È generalmente dotato di uno o più motori a pistoni o a turbina che azionano un complesso di pale che gli permettono di sollevarsi e abbassarsi verticalmente, restare fermo in volo, spostarsi lateralmente, all'indietro o in avanti e compiere voli similmente a quanto fa un aeroplano, ma con maggiore flessibilità e manovrabilità.
Più tecnicamente l'elicottero è caratterizzato da un'ala rotante, denominata rotore, che consente il decollo e l'atterraggio verticali senza necessità di pista e il volo a punto fisso, ovvero un volo sostentato a velocità nulla e quota costante, che ne rappresentano dunque i vantaggi principali rispetto all'aeroplano in molte situazioni di pattugliamento e di emergenza. Rispetto all'aeroplano raggiunge in media velocità e quote più basse (fino a 300 km/h e non più di 6 000 m di quota) ed ha un'autonomia minore consentendo quindi percorsi più brevi. Rappresenta oggi la categoria di aeromobili più diffusa dopo l'aeroplano, adibito a molti usi civili e militari.
Gli elicotteri non sono a rigore dei velivoli, ma appartengono ad un'altra categoria di aerodine: gli aerogiri. Putroppo vi è la cattiva abitudine, anche da parte degli addetti ai lavori, di classificare gli elicotteri come dei velivoli.
Indice
1 Storia
1.1 Età antica e moderna
1.2 Prima metà del XX secolo
1.3 Dal secondo dopoguerra ad oggi
2 Funzionamento
2.1 Il rotore
3 Tecniche di pilotaggio
3.1 I controlli
3.2 Decollo
3.3 Spostamento longitudinale
3.4 Cambio di direzione orizzontale
3.5 Gli stalli
3.6 L'autorotazione
4 Impieghi civili
5 Impieghi "duali"
6 Impieghi militari e di polizia
7 L'elicottero nella cinematografia
8 L'elicottero nei videogiochi
9 L'inquinamento acustico
10 Case produttrici
11 Note
12 Voci correlate
13 Altri progetti
14 Collegamenti esterni
Storia |
Età antica e moderna |

Un moderno taketombo giapponese

La vite aerea di Leonardo

Elicottero sperimentale di Enrico Forlanini del 1877, esposto al Museo nazionale della scienza e della tecnologia Leonardo da Vinci di Milano
La prima testimonianza storica di un oggetto in grado di sollevarsi verticalmente nell'aria grazie alla rotazione di un'elica risale alla Cina del V secolo a.C.: un giocattolo costruito in leggerissimo legno di bambù e costituito da un'elica a due pale collegata a un bastoncino che, fatto ruotare velocemente fra i palmi delle mani o mediante la trazione di una cordicella, lo faceva levare in volo.[1] Questi piccoli giocattoli, tuttora utilizzati anche in Giappone dove prendono il nome di taketombo, arrivarono in Europa presumibilmente nel XV secolo, dal momento che appaiono in alcuni dipinti a partire dal 1463.[2]
Circa vent'anni dopo Leonardo da Vinci, in un disegno del 1480 circa riportato nel Codice Atlantico,[3] abbozza il progetto di una "vite aerea" che, nelle sue intenzioni, avrebbe dovuto "avvitarsi" nell'aria sfruttandone la densità similmente a quanto fa una vite che penetra nel legno. La macchina era immaginata come una vite senza fine con una base del diametro di circa 5 metri, mossa dalla forza muscolare di quattro uomini e costituita da una struttura di legno rivestita di una tela di lino inamidato.[4] Non vi è tuttavia prova che Leonardo abbia effettivamente costruito la macchina da lui immaginata che rimarrebbe, quindi, una delle tante intuizioni teoriche della multiforme attività del celebre inventore[5] o, piuttosto, l'anticipazione ante-litteram di un'elica aeronautica.[6]
Nel luglio 1754 l'inventore russo Michail Lomonosov mostrò all'Accademia russa delle scienze un piccolo birotore in tandem potenziato da una molla e inteso come mezzo per portare in quota strumenti meteorologici.[7] Nel 1783, appena un anno dopo l'ascensione dei fratelli Montgolfier in pallone, il naturalista Christian de Launoy, con l'aiuto del suo meccanico Bienvenu, realizzò e presentò all'Accademia della Scienza di Parigi un giocattolo dimostrativo funzionante con due rotori controrotanti realizzati con piume di tacchino mosse da un archetto elastico metallico.[7][8][9] L'idea delle eliche controrotanti venne accettata come brevetto per la prima volta nel 1859 in risposta alla richiesta dell'inglese Henry Bright, cui fece seguito nel 1863 una simile registrazione di brevetti in Gran Bretagna e Francia da parte del visconte Gustave Ponton d'Amecourt. Questo pioniere del volo francese costruì un modello con un motore a vapore,[8] che però non fu in grado di sollevarsi in volo durante l'esposizione aeronautica di Londra del 1868, ma la validità del progetto si poté verificare quando volò una versione con i rotori mossi da elastici.[10] D'Amecourt chiamò i suoi modelli "hélicoptères" ed è per questo considerato l'inventore del termine.[7]
Nel 1877 l'ingegnere italiano Enrico Forlanini riuscì a far sollevare fino all'altezza di circa 13 metri un modello di elicottero del peso di 3,5 kg con due rotori bipala coassiali controrotanti utilizzando un motore a vapore alimentato da una piccola caldaia portata ad alta pressione attraverso un fornello che costituiva la base da cui il modello si involava e che restava a terra per non appesantirlo.[9]
Prima metà del XX secolo |
Nel 1901, l'inventore slovacco Ján Bahýľ costruì un modello di elicottero potenziato da un motore a combustione interna che riuscì a sollevarsi di 0,5 metri e che, una volta perfezionato, il 5 maggio 1905 si sollevò dal suolo di circa 4 metri compiendo un volo 1 500 metri.[7]
Nel 1906 due fratelli francesi, Jacques Breguet e Louis Charles Breguet, avvalendosi della collaborazione del professor Charles Richet, primi al mondo applicarono pale dotate di profilo alare ad un prototipo di elicottero realizzando il Gyroplane No.1, potenziato da un motore Antoinette da 45 CV che azionava per mezzo di una trasmissione a catena quattro rotori posti ai quattro vertici di una struttura a forma di X e muniti ciascuno di quattro pale biplane. In una data incerta compresa fra il 14 agosto e il 29 settembre 1907, lo strano velivolo riuscì a sollevarsi dal suolo di 60 cm con un passeggero a bordo per circa un minuto, ma l'impossibilità di spostarsi in volo controllato per la mancanza di qualsiasi dispositivo di comando, cosa che richiedeva la presenza di un uomo munito di un lungo rampone ad ognuno dei quattro vertici della macchina per mantenerla in assetto e impedire che si rovesciasse, fece sì che i voli del Gyroplane No. 1 vennero considerati come i primi voli con persone a bordo di un elicottero, ma non i primi voli liberi di un elicottero.[7][11]
L'elicottero di Paul Cornu del 1907
Il primo volo libero di un elicottero viene in generale riconosciuto alla macchina realizzata da un altro inventore francese (di origine rumena), Paul Cornu che, in collaborazione con il fratello Jacques e il padre Jules, progettò e costruì l'elicottero Cornu, un velivolo di 6 metri di lunghezza, in grado di ospitare un passeggero nel mezzo e dotato di due rotori controrotanti alle estremità messi in rotazione da un motore Antoinette da 24 cavalli.[7][9][12] Il 13 novembre 1907, a Lisieux, Cornu fu il primo uomo ad effettuare un volo libero controllato alzandosi in volo di 30 cm per circa 20 secondi, senza la necessità di vincoli di sicurezza e l'episodio viene riconosciuto come il primo volo libero effettivo di un elicottero con passeggero. In seguito Cornu effettuò pochi altri voli, fino ad arrivare ad un'altezza di quasi due metri, ma in realtà le soluzioni adottate non consentivano un efficace controllo del velivolo per cui ogni ulteriore esperimento venne abbandonato.[13]

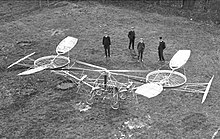
Uno dei primi voli del PKZ 2
Durante la prima guerra mondiale, l'ingegnere ungherese Theodore von Kármán, insieme al proprio assistente tenente Wilhelm Zuroveć e al maggiore Stephan von Petrócz, realizzò per l'Imperial regio esercito austro-ungarico il PKZ 1, una macchina costituita da una semplice struttura triangolare in tubi d'acciaio recante quattro eliche orizzontali portanti in legno, due destrorse e due sinistrorse, azionate da un motore elettrico da 190 CV alimentato da cavi che la macchina sollevava con sé insieme alle funi di vincolo. Dopo quattro voli di prova la macchina finì fuori uso per un guasto al motore e fu sostituito dal più grande PKZ 2, ideato come piattaforma fissa da osservazione per l'artiglieria in sostituzione dei palloni frenati. Il velivolo era dotato di due eliche coassiali controrotanti del diametro di 6 metri, azionate da tre motori Gnome da 100 CV, era privo di qualsiasi sistema di controllo ed era destinato a sollevarsi in verticale, essendo vincolato al suolo attraverso funi. Sopra le eliche poteva essere montata una struttura cilindrica in legno per l'osservatore.[14] La costruzione del prototipo cominciò a fine 1917 e l'elicottero compì il primo volo il 2 aprile 1918 vicino Budapest. Durante gli oltre trenta voli successivi la macchina, priva di passeggeri, raggiunse un'altezza massima di una cinquantina di metri (ben lontana dai 500 richiesti dall'esercito imperiale) riuscendo a rimanere in volo anche per un'ora. Il 10 giugno 1918, di fronte ad una commissione esaminatrice composta da autorità militari, l'aeromobile precipitò probabilmente per un guasto meccanico, danneggiandosi seriamente. La commissione decise per la non continuazione del progetto, che venne quindi sospeso.

L'elicottero di Pateras Pescara
Nei primi anni venti, l'argentino residente in Europa Raúl Pateras-Pescara de Castelluccio diede una delle prime dimostrazioni funzionanti di controllo del passo collettivo e di quello ciclico: le pale dei rotori coassiali controrotanti del suo prototipo potevano essere svergolate alle estremità attraverso dei cavi in modo da aumentare o diminuire la spinta prodotta. Nel suo progetto era prevista anche l'inclinazione in avanti di pochi gradi del mozzo dei rotori, in modo da consentire il moto in avanti dell'aeromobile senza dover usare un'elica separata come negli aeroplani. L'elicottero, denominato "No. 1", venne provato nel gennaio 1924, ma si rivelò sottopotenziato e non in grado di sollevare il proprio peso. Il governo britannico finanziò ulteriori ricerche di Pescara che portarono alla realizzazione del modello "No. 3" che, equipaggiato con un motore radiale da 250 hp, nel gennaio 1924 riuscì ad sollevarsi dal suolo rimanendo in volo per circa dieci minuti. Pateras-Pescara fu anche in grado di dimostrare il principio dell'autorotazione.[7][15][16]

L'elicottero Oehmichen N°2 nel 1923
Il 14 aprile 1924 il francese Étienne Oehmichen stabilì il primo record del mondo riconosciuto dalla Fédération Aéronautique Internationale (FAI), volando con il suo elicottero quadrirotore per 360 metri. Il 18 aprile 1924, Pescara batté il record di Oemichen, coprendo la distanza di 736 metri in 4 minuti e 11 secondi con una velocità quindi di circa 13 km/h, mantenendosi ad una altezza di sei piedi (circa 1,8 m). Record di distanza che fu di nuovo reclamato da Oehmichen il 4 maggio, quando, col suo modello N°2, coprì la distanza di 1,69 km in 14 minuti volando ad un'altezza di 15 metri.[7][17] Il 4 maggio, Oehmichen stabilì il primo record su circuito chiuso di 1 km per elicotteri, coprendo la distanza in 7 minuti e 40 secondi con il suo modello "No. 2".[7][18]
Nello stesso periodo negli Stati Uniti a Daytona, l'ingegnere e matematico rumeno Gheorghe Botezatu realizzò un elicottero per l'United States Army Air Service, ma pur ricevendo dei buoni risultati confermati anche da parte della stampa mondiale l'esercito cancellò il programma nel 1924 e il prototipo venne demolito, per presentare poi un altro elicottero, la cui indicazione era GB5 e come registrato nel libro "Storia Aeronautica ", pubblicato a Parigi nel 1932, era il " più perfetto elicottero vintage". Nel 1928, l'ingegnere aeronautico ungherese Oszkàr Asbóth costruì un prototipo di elicottero che riuscì a volare per non meno di 182 volte con una durata massima del singolo volo di 53 minuti.[7]
Albert Gillis von Baumhauer, un ingegnere aeronautico olandese, iniziò ad occuparsi di elicotteri nel 1923. Il suo primo prototipo volò (in realtà si limitò ad alzarsi in volo e rimanere in volo stazionario) il 24 settembre 1925, con ai comandi il capitano Floris Albert van Heijst dell'arma aerea dell'esercito olandese. L'elicottero era dotato di un rotore principale e un rotore anticoppia in coda mosso da un motore indipendente. La macchina era poco stabile e non ebbe seguito finendo distrutta in un incidente. La macchina di von Baumhauer era dotata di controllo del passo ciclico e di quello collettivo per i quali egli ottenne nel 1927 dal Ministero britannico dell'aviazione un brevetto d'invenzione con il numero 265 272.[7]

L'elicottero D'AT3 ideato da Corradino D'Ascanio in volo
Nel 1925, l'ingegnere italiano Corradino D'Ascanio e il barone Pietro Trojani fondarono la Società D'Ascanio-Trojani che si prefiggeva di costruire un elicottero realmente funzionante. Dopo i primi due prototipi D'AT1 e D'AT2, che a malapena riuscirono a sollevarsi dal suolo, venne realizzato il D'AT3, una macchina relativamente grande rispetto agli altri prototipi, dotata di due rotori coassiali e controrotanti. Il controllo avveniva utilizzando delle ali ausiliarie e piccole superfici di controllo comandabili sul bordo d'uscita delle pale,[19] un'idea in seguito utilizzata anche da altri progettisti di elicotteri, tra cui Bleeker e Kaman. Venivano inoltre impiegate tre piccole eliche montate sulla struttura per controllare sui tre assi rollio, beccheggio e imbardata. Pilotato dal maggiore Marinello Nelli all'aeroporto di Ciampino di Roma, il D'AT3 migliorò di poco i record FAI dell'epoca ottenendoli per l'altezza (17,4 m), durata (8 minuti e 45 secondi) e distanza (1078 m), ma si rivelò il primo prototipo di elicottero realmente funzionante e utilizzabile. Ciononostante le autorità militari non permisero all'inventore di accedere ai finanziamenti pubblici, indispensabili allo sviluppo del prototipo. Nel 1932 la Società D'Ascanio-Trojani, esaurite le disponibilità finanziarie, si sciolse e l'ingegnere D'Ascanio venne assunto dalla Piaggio per la progettazione di eliche. L'azienda consentì al progettista abruzzese, nel 1939, di costruire due prototipi di elicotteri, il "PD1" e "PD2" che andarono distrutti nel 1943, a causa dei bombardamenti alleati sugli stabilimenti di Pontedera.[19][20]
In Unione Sovietica due ingegneri aeronautici, Boris N. Yuriev e Alexei M. Cheremukhin, che lavoravano al Tsentralniy Aerogidrodinamicheskiy Institut (TsAGI, l'istituto centrale di aeroidrodinamica), realizzarono e fecero volare il TsAGI 1-EA, un elicottero basato su una struttura tubolare aperta, un rotore principale a quattro pale e due coppie di rotori gemelli da 1,8 metri di diametro con funzione anticoppia sistemate l'una sul muso e l'altra in coda. Potenziato da due motori M-2, copia russa del motore rotativo Gnome Monosoupape della prima guerra mondiale, lo TsAGI 1-EA fu in grado di compiere diversi voli a bassa quota con successo. Il 14 agosto 1932, Cheremukhin portò l'elicottero a una quota di 605 metri, superando abbondantemente il record di D'Ascanio, ma poiché l'Unione Sovietica non era ancora un membro della FAI il record non gli venne riconosciuto.[7] Un altro modello di elicottero era lo Kamov A7-3A che vantava 220 km di autonomia a 130 Km/h e con 500 kg di carico, vagamente somigliante a un popolare aereo da caccia sovietico di quegli anni, il Polikarpov I-16: costruito in una dozzina di esemplari per la V-VS venne testato sul campo durante la Guerra d'inverno, per aggiustare il tiro dell'artiglieria in qualità di ricognitore, per terminare la sua carriera agli inizi dell'operazione Barbarossa, utilizzato dai disperati comandi sovietici persino per l'attacco al suolo. Tutti i velivoli vennero persi dopo appena due settimane di servizio operativo. Questo è stato quindi probabilmente il primo elicottero d'assalto della storia, armato con bombe e razzi, protetto in coda da una piccola mitragliatrice.
L'ingegnere russo Nicolas Florine in quegli anni costruì il primo elicottero a rotori in tandem che effettuò il primo volo in Belgio a Sint-Genesius-Rode presso il Laboratoire Aérotechnique de Belgique (oggi von Karman Institute) nell'aprile 1933 e raggiunse la quota di sei metri e il record di resistenza in volo di otto minuti. Sebbene i rotori non fossero controrotanti, la compensazione della coppia era comunque ottenuta attraverso una leggera inclinazione dell'asse dei rotori in direzioni opposte. La scelta di non usare rotori controrotanti fu determinata dalla volontà di sfruttare la stabilizzazione fornita dall'effetto giroscopico. L'uso della co-rotazione dei rotori e la mancanza di cerniere nell'attacco delle pale con l'asse, rese l'elicottero particolarmente stabile in confronto alle macchine contemporanee.[7][21]
Dal secondo dopoguerra ad oggi |
Il forte impulso allo sviluppo dell'aeronautica avvenuto nel periodo della seconda guerra mondiale, aveva fatto maturare grosse esperienze di volo con gli aerei che potevano ormai fornire il necessario supporto per mettere a punto macchine capaci delle prestazioni caratteristiche dell'elicottero.

Compensazione delle coppie che agiscono su di un elicottero grazie al rotore di coda
Proprio con l'aereo ci si era ritrovati di fronte al problema della controrotazione dovuta alla coppia generata dal motore negli aerei monoelica, ma la presenza delle ali fisse e la proporzione fra la portanza (dipendente dalla superficie alare) e le velocità di quei velivoli rendeva agevole la soluzione. L'elicottero invece non aveva ali fisse, e si dovette attendere che qualcuno mettesse meglio a punto i concetti di eliche controrotanti o quello dei rotori anticoppia per avere degli aeromobili stabilizzati.
Ma il problema principale da risolvere era dovuto al fatto che quando un elicottero inizia a muoversi in avanti, le pale del rotore avanzanti si muovono ad una velocità assoluta maggiore poiché su di esse alla velocità dell'aeromobile si somma quella dovuta al movimento di rotazione, mentre su quelle retrocedenti accade il contrario. Quindi le prime sviluppano una portanza maggiore delle seconde e di conseguenza l'aeromobile tende a ribaltarsi di lato. Questo problema fu brillantemente risolto dall'ingegnere spagnolo Juan de la Cierva e utilizzato su un velivolo di sua invenzione, l'autogiro. De la Cierva applicò ad ogni pala del rotore una cerniera di flappeggio che consentiva alle pale avanzanti di ruotare verso l'alto a quelle retrocedenti di ruotare verso il basso in modo da compensare la differenza di portanza fra pale avanzanti e pale retrocedenti.[22][23]

Il primo prototipo di Focke-Wulf Fw 61 immatricolato D-EBVU
Proprio sfruttando l'esperienza acquisita attraverso la costruzione su licenza degli autogiri di Juan de la Cierva, il professore Henrich Focke e l'ingegnere Gerd Achgelis, riuscirono a realizzare nel 1936 in Germania il primo vero elicottero della storia, il Focke-Achgelis Fw 61 che, nettamente superiore ai suoi predecessori, portò i primati mondiali di quota, distanza e velocità a ben 3 427 m, 230,348 km e 122,5 km/h, esibendosi anche in una spettacolare dimostrazione all'interno della Deutschlandhalle di Berlino pilotato dalla famosa aviatrice tedesca Hanna Reitsch.[24]
Il primo modello militare impiegato attivamente fu invece il Flettner Fl 282 Kolibri (rispondente alla formula del cosiddetto sincrottero, con due rotori controrotanti intersecantisi le cui coppie si annullavano a vicenda, una formula che dopo la guerra venne ripresa dalla ditta americana Kaman) progettato da Anton Flettner e usato dalla Kriegsmarine, la marina militare tedesca, durante la seconda guerra mondiale per il pattugliamento antisommergibile a bordo delle navi di scorta ai convogli.[24]
Tuttavia l'elicottero si affermò negli Stati Uniti ad opera del progettista aeronautico di origine russa Igor Sikorsky, che il 13 maggio 1940 portò in volo il suo Vought-Sikorsky VS-300. Questo elicottero, migliorato e sviluppato, segnò il definitivo successo della formula monorotore con rotore anticoppia in coda (secondo lo schema suggerito fin dal 1912 da Boris Yuriev), oggi comune alla maggior parte degli elicotteri ma che all'epoca pionieristica non aveva goduto di molta fortuna.[24] Invece, la formula birotore a rotori coassiali venne portata al successo dal progettista sovietico Nikolaj Ilič Kamov, che nel 1952 realizzò il Ka-15, primo elicottero costruito in serie di una lunga serie di macchine progettate da Kamov a partire dagli anni della seconda guerra mondiale.[25]
Funzionamento |
L'elicottero è dotato di un motore aeronautico leggero che muove i rotori (che potrebbero intendersi come gli elementi finali della trasmissione, ma sono anche delle macchine a sé, provvedendo altre funzioni di gestione delle pale), i quali portano in rotazione una serie di ali, dette pale, le quali muovono l'aria in modo da far spostare l'aeromobile per reazione. Per questo gli elicotteri si definiscono anche aerodine ad ala rotante, in contrapposizione agli aerei, denominati ad ala fissa.
Per la portanza taluni giudicano improprio parlare di portanza in senso aerodinamico, trattandosi di un vero e proprio flusso orientato di origine meccanica, e dunque di una spinta. Come per la nautica, la portanza/spinta è fornita all'aeromobile dalle pale, le quali provocano la forza di reazione.
Le pale, in realtà, non sono orizzontali, ma hanno un'inclinazione rispetto al piano orizzontale, così che quando ruotano possano fendere l'aria e sospingerla verso il basso con maggiore o minore spinta. Questa inclinazione è detta "angolo d'incidenza" ed è regolabile secondo le necessità d'impiego con un controllo detto "collettivo" (vedi oltre).
Una pala ruotando prenderà l'esatta posizione delle altre quindi esse non hanno un'inclinazione differente tra loro quando l'elicottero sale o scende, e nel caso l'elicottero debba spostarsi in altre direzioni esse cambiano inclinazione ciclicamente (tramite il passo ciclico) in una posizione del disco che descrivono dove avranno un angolo di incidenza differente, ma l'inclinazione non andrà mai oltre il piano orizzontale al velivolo altrimenti il flusso d'aria generato sarebbe verso l'alto e la spinta conseguente verso il basso e in tal caso si parla di collettivo negativo il quale si rivela utile solo per compiere discese rapide, governare l'elicottero da capovolti o in caso di emergenza. Il collettivo negativo può in effetti essere utilizzato per compiere un atterraggio d'emergenza quando il motore è guasto. Mentre l'elicottero scende, subisce un flusso d'aria dal basso verso l'alto che può mantenere in moto le pale, ma se esse restassero allo stesso angolo di attacco di quando era in funzione il motore e spingevano l'aria verso il basso, la rotazione indotta sarebbe opposta a quella precedente. Dunque è essenziale passare al collettivo negativo per sfruttare le pale come resistenza alla discesa e per preservarne il verso di rotazione, per poi passare al collettivo positivo prima dell'atterraggio. Questo permette di sfruttare il movimento inerziale delle pale e ricevere una spinta verso l'alto in grado di ammorbidire il contatto col suolo.

Schema dell'uso dei gas di scarico per compensare la coppia generata dal rotore

Elicottero senza elica di compensazione della coppia dovuta al rotore principale. I gas di scarico emessi lateralmente in coda (sotto controllo del pilota) generano la coppia di compensazione
Il problema non risolto da Leonardo da Vinci riguarda il moto circolare del rotore, che crea una forte coppia rotazionale in direzione opposta, che deve essere compensata affinché l'aeromobile possa mantenere una direzione definita: al moto delle pale che girano in un senso, infatti, verrebbe ad aggiungersi, per compensazione, un corrispondente moto del corpo dell'aeromobile in senso inverso.
Per evitare questo moto indesiderato, nella coda degli elicotteri, è installato un secondo piccolo rotore detto rotore di coda, le cui pale girano sul piano verticale, per bilanciare la rotazione orizzontale di quelle del rotore principale. In alcuni modelli, dotati di due rotori principali controrotanti come gli Hokum russi od i Chinook americani, questo accorgimento non è necessario poiché le pale di ciascun rotore hanno rotazioni antagoniste e non causano quindi nessuna rotazione del corpo. L'inclinazione delle pale del rotore di coda sarà la medesima ma a differenza di quella del rotore principale che normalmente consente un flusso d'aria solo verso il basso essa generalmente consente un flusso d'aria sia verso destra che verso sinistra in questo modo, oltre che compensare la coppia, si può anche ruotare l'elicottero.
Recentemente sono comparsi sul mercato dei nuovi modelli che sfruttano il flusso d'aria generato dai gas di scarico della turbina, indirizzandolo lateralmente in coda, per ottenere lo stesso risultato.
Il rotore è un pezzo molto sofisticato, perché consente, all'aumentare della velocità dell'elicottero, di cambiare l'inclinazione delle pale ad ogni giro, cosa tutt'altro che semplice, ma indispensabile per evitare che l'elicottero si ribalti anche a velocità minime, a causa della maggiore spinta fornita dalle pale che stanno girando contro vento, quindi con velocità all'aria maggiore.
Il rotore |
.mw-parser-output .vedi-anche{border:1px solid #CCC;font-size:95%;margin-bottom:.5em}.mw-parser-output .vedi-anche td:first-child{padding:0 .5em}.mw-parser-output .vedi-anche td:last-child{width:100%}

Testa del rotore dell'MD 500E
Il rotore principale di un elicottero ha la funzione di fornire le forze sostentatrice e propulsiva nonché le coppie di rollio e di beccheggio necessarie per il controllo longitudinale e trasversale.
I parametri geometrici principali del rotore sono:
- il numero delle pale
- la forma delle pale: sezione, allungamento, rapporto di rastremazione, svergolamento
- la forma del profilo: spessore, curvatura e così via.
Le pale del rotore sono collegate al mozzo per mezzo di tre cerniere. L'impiego delle cerniere fu introdotto per limitare le notevoli sollecitazioni di flessione alla radice delle pale e per ridurre in fase di volo in avanzamento il momento meccanico di rollio dovuto alla maggiore velocità della pala avanzante rispetto a quella arretrante.
Le tre cerniere sono:
cerniera di flappeggio (in inglese flapping hinge), consente il movimento della pala in un piano determinato dal suo asse longitudinale e dall'asse di rotazione del rotore. In genere il movimento attorno all'asse di flappeggio è completamente libero.

movimenti delle pale comandate dal piatto oscillante
cerniera di brandeggio (lag hinge), consente la riduzione delle sollecitazioni di flessione nel piano della pala. Consente quindi il movimento sull'asse normale al disco del rotore. A differenza dell'asse di flappeggio il movimento è contrastato da smorzatori (lag dumper).
cerniera di torsione (feathering hinge), serve a variare il passo della pala (ovvero l'angolo di incidenza del profilo della pala) ed è controllato dal pilota.
Le tre cerniere possono essere disposte in ordine differente a seconda del modello di elicottero.

Cockpit di un Bell 212
Tecniche di pilotaggio |
La conduzione di un elicottero è completamente differente da quella di un aereo, poiché i principi fisici in gioco sono solo parzialmente gli stessi. Nell'aereo si usa sostanzialmente una mano per l'assetto orizzontale e laterale ed i piedi per la direzione. Nell'elicottero occorre avere una mano anche per regolare la potenza del motore e l'inclinazione delle pale, quindi occorre coordinare cinque movimenti invece di tre. Inoltre, mentre l'aereo è stabile e può proseguire il volo orizzontale da solo, l'elicottero non appena vengono abbandonati i comandi tende ad inclinarsi o ad alterare la posizione.
In realtà il volo orizzontale non presenta grandi difficoltà, mentre mantenere l'elicottero fermo in una posizione, quota e direzione determinate è estremamente difficile, in particolare in presenza di vento, il che complica gli atterraggi di precisione e soprattutto i recuperi dall'alto con il verricello.
Negli elicotteri a turboalbero non occorre prestare particolare attenzione a non far perdere giri al motore, in quanto questa incombenza viene normalmente demandata al governor della turbina che agendo sul fuel control (cioè sul controllo del combustibile iniettato) assicura che il rotore principale giri sempre con la velocità prevista dal progetto e di conseguenza anche quello di coda, in modo che l'aeromobile non perda mai efficienza rotorica. Per quanto riguarda invece gli elicotteri equipaggiati con motori a scoppio (motori endotermici) è compito del pilota prestare particolare attenzione a non far scendere il motore dal regime di rotazione previsto, altrimenti si potrebbe perdere drasticamente potenza, con la conseguente perdita di controllo dell'aeromobile dovuta ad una inefficienza rotorica. Quindi, se viene aumentato l'angolo delle pale eccessivamente senza compensarlo con un aumento dell'acceleratore, il motore perde giri e anche ridando "tutta manetta", non si riprende, se non riportando le pale in posizione neutra. Se il motore finisce per spegnersi, occorre molto tempo per riaccenderlo (operazione molto difficoltosa e pericolosa).
Alcuni elicotteri sono sprovvisti della manetta di controllo del motore, inoltre la maggior parte degli elicotteri a turbina (esotermici) vengono pilotati con la o le manette completamente frizionate, rendendo impossibile una regolazione istantanea da parte del pilota. La maggior parte degli elicotteri con motore a pistoni è al giorno d'oggi provvista di un sistema automatico di controllo del regime del motore (governor).
I controlli |
I controlli dell'elicottero sono: il collettivo, la manetta, il ciclico e la pedaliera.
Il collettivo (o CPC - collective pitch control) controlla l'angolo di calettamento geometrico delle pale, il quale non va confuso con l'angolo di attacco, cioè l'inclinazione delle pale rispetto al piano orizzontale sul quale sono innestate (di questo piano, l'asse di rotazione del rotore è la normale). All'aumento dell'angolo di attacco corrisponde un aumento di incidenza e conseguente di portanza ed esso è solo in parte regolato dal collettivo, in quanto è il ciclico che varia l'inclinazione della pala ad ogni rotazione per spostare l'aeromobile nelle varie direzioni, mentre il collettivo comporta una variazione dell'inclinazione su tutte le pale contemporaneamente in modo da ricevere più o meno spinta verso l'alto dell'elicottero.
La manetta è un semplice acceleratore che consente di controllare il regime del motore e dunque di trasmettere maggiore o minor potenza al rotore secondo la necessità del momento. Nei modelli più recenti con motore a turbina si utilizza un sistema computerizzato di gestione dei regimi che consente di delegare al software accelerazione e decelerazione del motore. Questo sistema è chiamato FADEC (Full Authority Digital Engine Control), termine usato anche per il sistema presente negli aerei che svolge la stessa funzione, rendendo non più necessario l'uso della manetta se non in caso di emergenza. I più recenti elicotteri monomotore sono equipaggiati con due FADEC di cui uno è alimentato da una batteria indipendente, in modo tale da assicurare un perfetto funzionamento dell'elicottero anche in caso di completa avaria elettrica e/o elettronica.

Piatto oscillante di un elicottero radiocomandato
1. piatto esterno fisso (blu)
2. piatto interno rotante (metallo)
3. giunto sferico
4. controllo lungo l'asse di beccheggio. Inclina il rotore in senso longitudinale e evita la rotazione dell'anello esterno (compasso).
5. controllo lungo l'asse di rollio. Inclina il rotore lateralmente
6. bielle di collegamento (color metallo) alle pale del rotore
In nero le bielle che variano il passo delle pale controllate dal piatto interno
Il ciclico, con comando a cloche, è il più sofisticato ed il più delicato dei controlli, poiché governa la variazione ciclica dell'angolo di attacco delle pale: le pale, durante il loro giro di 360° non hanno un angolo di attacco costante, ma hanno una variazione di inclinazione che serve in generale ad ottimizzare la propulsione, ed in particolare a distribuire opportunamente la spinta in modo da consentire variazioni di assetto e spostamento dell'elicottero.
Questa variazione è appunto dominata dal ciclico, così chiamato perché la fa operare nel numero di volte desiderate e possibili per ciascun giro della pala (per cicli).
La variazione è poi opportunamente anticipata (calettatura) tenendo conto di fattori come la precessione giroscopica. Infatti, se su di un corpo che ruota su sé stesso andiamo ad imprimere una forza trasversalmente al suo asse di rotazione essa risponderà 90° dopo rispetto al senso di rotazione stesso; quindi quando diamo ciclico avanti (ipotizziamo un rotore sinistrorso, cioè che gira in senso antiorario) le biellette del piatto oscillante si alzeranno ed andranno a dare ulteriore passo alla pala che sarà a sinistra cosicché la portanza si porterà in maggior parte sul semidisco posteriore e l'elicottero potrà traslare in avanti.
La pedaliera aziona tramite leveraggi il rotore di coda (se esistente) il quale consente il controllo della direzione della prua dell'aeromobile rispetto alla direzione di avanzamento, ovvero il controllo dello "yaw axis".
Essa svolge una importantissima funzione durante i decolli e gli atterraggi verticali: l'abbassarsi o l'innalzarsi della leva del passo collettivo comporta infatti variazioni della coppia di reazione che cambiano la direzione della prua.
Poiché il rotore di coda ha molto più braccio della prua dell'elicottero rispetto all'asse di rotazione del rotore principale, pochi gradi di variazione dell'angolo di prua possono muovere facilmente il pericoloso rotore anche di un metro a destra od a sinistra.
Occorre grande prontezza per compensare con il piede eventuali turbolenze che colpiscano le pale in modo non uniforme.
Decollo |
Il decollo dell'elicottero si ottiene incrementando la spinta che le pale esercitano sull'aria; questo è possibile aumentando il passo collettivo (angolo d'incidenza delle pale) che determina una maggiore esposizione all'aria della superficie alare.
In questa fase il numero di giri del rotore rimane costante come del resto in tutte le fasi del volo (manetta su flight).
Bisogna inoltre esercitare una pressione sulla pedaliera che comanda il rotore di coda in modo da esercitare una forza pari ed opposta al rotore principale.
Il rotore di coda non è altro che "un'anticoppia" che si contrappone alla coppia del rotore principale che determinerebbe una rotazione della fusoliera nel senso opposto alla rotazione del rotore. (3º principio della dinamica: ad ogni azione ne corrisponde una uguale e contraria).
Facendo ciò l'elicottero si alza e rimane nell'assetto di volo desiderato.
Spostamento longitudinale |
Il pilota per portare l'elicottero dal volo a punto fisso al volo traslato non farà altro che portare in avanti la leva del passo ciclico, però così facendo l'elicottero prenderà un assetto picchiato e quindi perderà quota, per ovviare al problema bisognerà dare un po' di collettivo per far sì che la portanza sia pari al peso più il difetto di assetto; però dando collettivo il pilota darà più resistenza al rotore principale quindi la coppia generata sarà più forte, la diminuirà dando pedaliera nel senso di rotazione del rotore. Chiaramente tutte le sopracitate operazioni andranno fatte quasi contemporaneamente.
Cambio di direzione orizzontale |

Robinson R22. Questo modello è usato di frequente nelle scuole di pilotaggio per elicotteri
La "svolta" orizzontale a sinistra o a destra, tecnicamente una virata, si ottiene con un opportuno sfruttamento di quella controrotazione che era il problema da superare per il genio di Leonardo.
In volo i due rotori sono in moto rispettivamente bilanciato e producono l'uno lo spostamento (verticale) e l'altro la stabilizzazione (longitudinale).
Nell'elicottero tradizionale, quindi, il rotore di coda consente il cambio di direzione (taluni dicono "cambio di prua") semplicemente intervenendo sul passo delle pale: aumentandolo o diminuendolo, il rotore di coda darà minore o maggiore contrasto al moto "istintivo" di controrotazione, facendo perciò spostare la coda dell'aeromobile e dunque cambiare di direzione.
Nell'elicottero ad eliche controrotanti (come il Chinook), invece, un principio simile consente di intervenire sulla velocità di rotazione di uno dei due rotori, con produzione di analoghi effetti ed uguali risultati.
Gli stalli |
Lo stallo di un elicottero avviene quando i filetti fluidi di aria che viene investita dalla pala si staccano in prossimità del bordo d'attacco quindi non si verrà a creare la zona di depressione sull'estradosso (parte superiore della pala) e la nostra pala non avrà più portanza: tale situazione si verifica con un angolo di incidenza superiore ai 18°, costruttivamente dando tutto passo non si raggiungono valori così alti però in determinate situazioni ci si può arrivare.
Lo stallo del rotore è la principale causa dei limiti di velocità di un elicottero, se noi consideriamo che le pale girando vanno a creare un disco e mettiamo questo disco in VRO (volo rettilineo orizzontale) a velocità abbastanza elevate noteremo che metà disco (semidisco avanzante) andrà ad investire aria rispetto al senso di marcia mentre l'altra metà (semidisco retrocedente) la subirà negativamente.
Tenendo conto che nella formula della portanza (P = 1/2 densità x coefficiente di portanza x sezione profilo x (velocità x velocità)) la velocità entra al quadrato, al semidisco avanzante andrà sommata la velocità dell'elicottero mentre al semidisco retrocedente questa velocità andrà sottratta, avremo quindi un semidisco con una portanza molto elevata ed un semidisco con una portanza pressoché nulla quindi l'elicottero comincerà a vibrare in maniera molto forte e poi comincerà a girare su sé stesso.
In ultimo il più pericoloso degli stalli: il cosiddetto power settling (scaduta con potenza) comunemente chiamato anello vorticoso o stato di vortice (in inglese è detto anche vortex ring state); calcolando che il rotore genera un flusso d'aria che lo attraversa dall'alto verso il basso se il pilota si appresta ad un atterraggio quasi verticale con una velocità di discesa sostenuta c'è il rischio che l'elicottero scenda alla velocità dell'aria da lui stesso generata e quindi avremo il rotore che "naviga nel vuoto"; aumentando il passo collettivo non faremo altro che aumentare la velocità di questo flusso per cui peggioreremo solo la situazione, l'unica maniera per uscirne è entrare in autorotazione, se la quota lo permette, e traslare in avanti riducendo il passo collettivo, una volta fuori dal flusso potremo ridare passo (Vedi nota[26]).
Il vortice può investire l'elicottero anche in caso di vento relativo in coda, cioè se l'elicottero è fermo con vento da dietro, oppure se l'elicottero procede all'indietro. Questa situazione deve essere assolutamente evitata perché rende l'elicottero ingovernabile.
L'autorotazione |
 |
 |
Descrizione del fenomeno della autorotazione. Durante un'autorotazione, il flusso diretto verso l'alto dell'aria permette al rotore principale di girare alla velocità normale. In pratica, regolando l'incidenza della pala in discesa, si garantiscono nel contempo, la componente in avanti e la componente di portanza del vettore risultante "forza aerodinamica". |
È la manovra di emergenza effettuata durante la discesa dopo un'avaria all'impianto motore, simulata o reale. Durante questa discesa controllata, il rotore principale gira a causa del flusso d'aria verticale attraverso il disco del rotore. Il pilota deve abbassare il collettivo per mantenere il numero di giri al minuto del rotore principale durante la discesa entro parametri prestabiliti. La velocità di rotazione non può essere né troppo alta, né troppo bassa per evitare danneggiamenti strutturali. Il pilota, poco prima dell'atterraggio, alza il collettivo e frena l'elicottero.
Nell'elicottero l'autorotazione equivale alla planata con motore spento in un aeroplano. I piloti si esercitano nell'autorotazione in modo da riuscire ad effettuare un atterraggio di emergenza. Durante l'autorotazione, viene disattivato il collegamento tra il rotore principale ed il motore, che non fornisce più al rotore l'energia necessaria per girare. L'energia viene invece generata dal passaggio dell'aria attraverso le pale durante la discesa e dalla forza d'inerzia del rotore principale. Il numero di giri al minuto del rotore è il fattore più importante da considerare durante l'autorotazione. Girando, il rotore fornisce la portanza necessaria a stabilizzare la discesa ed immagazzina l'energia utilizzata per ammortizzare l'atterraggio. Se il numero di giri al minuto diminuisce eccessivamente, il rotore non potrà svolgere questa funzione poiché, ad esempio, diminuirà la componente di portanza.
Qualunque elicottero deve essere in grado di scendere in autorotazione; esistono però dei campi di velocità pericolosi, cioè condizioni di volo per le quali l'autorotazione non garantisce un buon esito:
- una prima condizione è rappresentata da volo a bassa velocità e a bassa quota; in questo caso se si ferma il motore, la bassa velocità di traslazione non permette di ottenere un flusso d'aria attraverso il disco sufficiente a produrre una portanza idonea a frenare la discesa ed evitare l'impatto con il suolo.
- la seconda condizione critica di volo si ha quando l'elicottero vola comunque al sotto di una certa altezza dal suolo, anche ad elevata velocità di traslazione. In questo caso, l'inevitabile perdita di quota conseguente all'avaria del motore, comporterà l'impatto con il suolo, senza che ci sia il tempo di effettuare in sicurezza la manovra di frenata all'ultimo istante, che garantirebbe l'incolumità (detta flare).
L'insieme di queste condizioni di volo è rappresentato sul grafico caratteristico quota-velocità, con un'area al di sotto di una curva che prende il nome di "curva dell'uomo morto".[27] I piloti di elicottero sono a conoscenza del fenomeno e cercano di restare in queste condizioni il minor tempo possibile, guadagnando quota e velocità, appena possibile, e permanendo nelle condizioni quota-velocità critiche solo per lo stretto necessario, o quando non sia possibile farne a meno.
Impieghi civili |

L'elicottero Sikorsky S-64 "gru volante" mentre trasporta una casa prefabbricata

Eliambulanza del 118 in Toscana (A109)
Gli impieghi civili dell'ala rotante sono molteplici. Questa qualità specifica deriva dal fatto che l'elicottero può atterrare e decollare in spazi ristretti, può rimanere immobile in aria e muoversi in tutte le direzioni, anche all'indietro.
Tra gli utilizzi civili, sicuramente è da annoverare il trasporto di persone e di materiale e merci. Uno degli elicotteri più grandi al mondo, il russo Mi-6, può trasportare 90 passeggeri oppure 12.000 kg di carico.
Il servizio di eliambulanza (o elisoccorso), invece, ha assunto un particolare rilievo grazie alla possibilità concreta di salvare molte vite umane. Molti elicotteri vengono progettati dalle aziende costruttrici già in versione "eliambulanza" che prevede un ampio vano di carico per ospitare a bordo anche più barelle. Il servizio di eliambulanza in Italia è gestito dal 118 che ha basi in varie regioni. Dispone di 7 modelli di elicotteri che sono AgustaWestland AW139, Bell 412, AgustaWestland AW109, Eurocopter EC 135, Eurocopter BK117, Eurocopter EC145 e Eurocopter AS 365.
L'utilizzo antincendio viene effettuato con elicotteri equipaggiati di benna, un recipiente semirigido che può essere riempito d'acqua facilmente ed in breve tempo. Esistono anche modelli di elicottero che invece aspirano l'acqua da un tubo mobile per immagazzinarla in un serbatoio posto sul fondo dell'aeromobile. In Italia il primo reparto elicotteri dei vigili del fuoco è stato creato a Modena nel 1954 con un AB.47G-2 poi denominato Bell 47. L'iniziativa fu un successo e l'anno successivo vennero acquistati altri elicotteri e vennero creati due nuovi nuclei a Roma e Napoli. Oggi i vigili del fuoco dispongono di tre modelli dei elicotteri che sono Bell 412, Bell 206 e Bell UH-1 Iroquois.
Altri impieghi sono la costruzione di teleferiche e funivie, la realizzazione e la manutenzione di reti elettriche e di comunicazione in aree impervie, il trasporto in montagna e l'utilizzo per le riprese televisive.
Impieghi "duali" |
Vari competitori europei del settore difesa-aerospazio - fra i quali l'italiana Leonardo- producono e commercializzano velivoli aeronautici detti dual purpose (elicotteri duali) perché impiegati:
- per scopi civili(dai Vigili del Fuoco, Guardie Forestali, Protezione Civile: per operazioni di soccorso, spegnimento incendi, monitoraggio ambientale e climatico,
- per finalità militari (Aeronautica Militare, ecc.): elicottero d'attacco in forze di interposizione internazionali.
Dal punto di vista sia tecnico che economico risulta fattibile (cost-effective) la conversione operativa da un impiego militare ad uno civile e viceversa, con costi minimi rispetto ai benefici attesi. Tali benefici per un investimento pubblico in genere sono stimati con una più puntuale e accurata analisi costi-efficacia.
Questi velivoli aeronautici sono progettati e dimensionati specificamente per un duplice scopo e con la flessibilità necessaria nell'eventualità di una diversa tipologia di impiego. Gli "adeguamenti" tecnici non dovrebbero prevedibilmente comportare modifiche strutturali e geometriche per le parti più complesse e costose, quanto l'installazione di parti d'arma, dotazioni elettrooniche di rilevamento e simili.
Nelle contabilità del bilancio pubblico i singoli capitoli di spesa (nel previsionale, e consultivo) hanno la propria copertura finanziaria (mediante corrispondenti entrate fiscali, stanziamenti o trasferimenti fra organi della PA). L'acquisto di un bene dato in proprietà e impiegato da un corpo non militare non è a carico del bilancio del Ministero della difesa.[28]
Un eventuale conversione da scopi civili all'impiego per finalità militari finisce per sottostimare l'effettiva spesa militare e i relativi vincoli di bilancio, ovvero per permettere investimenti di acquisto che, senza il contributo di altri Ministeri, non sarebbero possibili per mancanza di copertura finanziaria.
Impieghi militari e di polizia |

Elicottero utilizzato dalla Gendarmerie nationale francese (Écureuil AS 350)

Elicottero utilizzato dalla Polizia italiana (AB 212)
Di solito gli elicotteri dei vari corpi di polizia nel mondo vengono impiegati in attività di soccorso, monitoraggio, recupero in mare o in montagna. Vengono anche impiegati durante le manifestazioni di vario genere o partite di calcio, passando per il monitoraggio del traffico automobilistico su strade e autostrade nei week-end e durante i periodi di estivi, in generale durante i periodi delle vacanze, oppure vengono utilizzati per contrastare i fenomeni di contrabbando.
Grazie alle loro ridotte dimensione sono sempre pronti a entrare in azione per garantire la sicurezza dei cittadini dall'alto.
In Italia elicotteri sono in dotazione in tutte le forze armate e forze dell'ordine, in particolare nella Polizia di Stato, nell'Arma dei Carabinieri, nella Guardia di Finanza, nell'Esercito Italiano, nell'Aeronautica Militare, nella Marina Militare, nel Corpo Forestale dello Stato, nel Corpo Nazionale dei Vigili del Fuoco, nel Corpo delle capitanerie di porto - Guardia costiera e nella Protezione Civile. In Italia il primo gruppo volo della polizia di stato è stato costituito ufficialmente il 1º gennaio 1971 a Pratica di Mare (Roma). Oggi conta 11 gruppi che coprono tutto il territorio nazionale. La polizia di stato ha in dotazione tre modelli di elicotteri: Agusta-Bell AB206, AgustaWestland AW109 e Agusta-Bell AB 212.
L'arma dei carabinieri, invece, ha una lunga storia con il volo visto che durante la prima guerra mondiale ci furono dei piloti carabinieri. Ma il reparto volo con elicotteri viene costituito il 25 marzo 1960 con l'acquisto da parte dell'arma di quattro AB 47 J "Ranger" poi denominato Bell 47 che operavano in Sardegna, Puglia e Sicilia.
Oggi L'arma ha a disposizione tre tipi di elicotteri (Agusta-Bell AB206, AgustaWestland AW109 e Agusta-Bell AB 412) che operano su tutto il territorio nazionale.
La prima struttura del reparto volo dei carabinieri è nata il 1º giugno 1965 a Pratica di Mare.
Gli eserciti utilizzano gli elicotteri ovviamente come mezzi di combattimento, ma anche come supporto per i militari e mezzi a terra, esplorazione di scenari di guerra e il trasporto di militari, mezzi o di feriti (elicotteri cargo). I mezzi dell'esercito vengono utilizzati anche nelle emergenze e nelle catastrofi ambientali come accaduto in Abruzzo dove elicotteri militari hanno aiutato il trasporto dei feriti gravi e il trasporto degli aiuti che arrivavano da tutto il paese.
L'esercito italiano ha in dotazione gli stessi modelli delle forze dell'ordine (AB206, AB205, AW109, AB412 e AB212) inoltre utilizza, come elicottero da combattimento, il AgustaWestland AW129 ideato e prodotto completamente in Italia, anche se ricorda per fisionomia l'Apache statunitense, e come elicotteri da trasporto l'esercito ha in dotazione due modelli il Boeing CH-47 Chinook che può trasportare mezzi o militari e il NHIndustries NH90 che è impiegato per il trasporto di persone.
L'elicottero nella cinematografia |
Gli elicotteri hanno un vasto impiego nella produzione cinematografica e televisiva. I moderni sistemi girostabilizzati, consentono l'utilizzo degli elicotteri come piattaforme stabili e versatili per girare riprese aeree di grande impatto,[29] sia nei film che nelle pubblicità.[30] Esistono società specializzate ed autorizzate all'utilizzo di elicotteri per riprese cinematografiche.[31][32]
In molti casi, particolarmente nei film di guerra o di azione, l'elicottero è presente nelle scene, contribuendo con alta spettacolarità.[33] Di seguito alcuni esempi:[34]
Bell 47 Sioux - Il primo elicottero certificato per uso civile, protagonista di Avventure in elicottero (Whirlybirds), una serie televisiva statunitense in 111 episodi andati in onda dal 1957 al 1960 negli Stati Uniti e negli anni sessanta in Italia sulla RAI. Negli Stati Uniti la serie è conosciuta anche con il nome di Copter Patrol. È stato inoltre protagonista del film e della serie TV M*A*S*H (1970) nella versione eliambulanza, e nei film di James Bond (interpretato da Sean Connery) A 007, dalla Russia con amore (film) (1963), in cui dopo essere sceso dal treno viene attaccato da un elicottero della Spectre che viene poi abbattuto da Bond, e Agente 007 - Si vive solo due volte (1967) in cui vola su un autogiro alla ricerca di una base della Spectre e viene attaccato da una squadriglia di questi elicotteri.
Bell UH-1 Iroquois, soprannominato Huey dagli equipaggi - Impiegato largamente durante la guerra del Vietnam, è presente in tutte le principali pellicole ambientate nel conflitto. Celebre è la sequenza dell'attacco al villaggio sulla musica della cavalcata delle valchirie in Apocalypse Now (1979). Si ricordano anche le sequenze drammatiche per l'evacuazione di feriti in Platoon (1986) e We Were Soldiers - Fino all'ultimo uomo (2002). Oltre ai film sul Vietnam, l'elicottero è stato largamente impiegato nel cinema di Hollywood fino a tempi recenti. In Matrix (1999) viene utilizzato per salvare il protagonista dopo un corso di pilotaggio di pochi secondi ricevuto via computer dalla coprotagonista impersonata da Carrie-Anne Moss. In Behind Enemy Lines - Dietro le linee nemiche (2001) il team di salvataggio del pilota abbattuto utilizza dei Bell UH-1N Twin Huey in versione armata di razzi e minigun.
Hughes OH-6 Cayuse detto anche Loach - Elicottero da osservazione coprotagonista della sequenza della cavalcata delle valchirie con lo Huey in Apocalypse Now.
Sikorsky UH-60 Black Hawk - Al centro della battaglia di Mogadiscio del 1993 in Somalia, ricostruita nel film Black Hawk Down - Black Hawk abbattuto, diretto da Ridley Scott nel 2001. La versione HH-60J Jayhawk della United States Coast Guard è protagonista delle riprese di ricerca e salvataggio in La tempesta perfetta (2000) e The Guardian - Salvataggio in mare (2006); invece, nel film Caccia a Ottobre Rosso un Seahawk della marina statunitense decolla per silurare il sommergibile russo.
Apache - Protagonista del film Apache pioggia di fuoco, titolo originale Fire Birds del 1990, incentrato sull'addestramento di un pilota da combattimento (Nicolas Cage) nella guerra a narcotrafficanti che utilizzavano un elicottero da combattimento di finzione chiamato Scorpion, in realtà derivato dall'OH-6 Cayuse. Nel film L'incredibile Hulk, Hulk viene attaccato da un Apache che abbatte lanciandogli un rottame di ferro. In G.I. Joe: la nascita di Cobra 2 Apache fanno da scorta al convoglio che i Cobra intercettano, e vengono abbattuti dalle armi futuristiche della gunship (cannoniera) di Cobra
OH-58D Kiowa - Versione militare del Bell 206 JetRanger, utilizzato come elicottero da osservazione e coprotagonista con l'Apache nel film Apache pioggia di fuoco. Utilizzato anche estesamente nel ruolo di elicottero della polizia in molti telefilm girati in USA.
MD-520N NOTAR - Compare nel film Mission: Impossible (1996) in un inseguimento a un treno TGV che si conclude all'interno dell'Eurotunnel.
MH 53 Pave Low - È l'elicottero in cui si trasforma il Decepticon Blackout nel film Transformers di Michael Bay del 2007. In Transformers - La vendetta del caduto appare un modello simile di colore leggermente diverso, tratto dal giocattolo Grindor, un redeco di Blackout. In L'incredibile Hulk, il generale Ross si reca con la sua squadra a New York a bordo di un MH-53, che poi si intrometterà nello scontro tra Hulk e Abominio e verrà abbattuto.
RAH-66 Comanche - 4 Comanche attaccano Hulk nel film del 2003; Hulk ne abbatte uno rilanciandogli addosso un missile Hellfire, e salta addosso ad un altro facendolo schiantare per il peso e lo spostamento del baricentro; i due rimasti lo inseguono e tentano di seppellirlo tra le montagne colpendo le rocce con i missili.
Aérospatiale SA 341 Gazelle - due esemplari di questo modello furono modificati (la cabina era simile a quella di un Apache o un Cobra) per il film Tuono blu e per la serie tv omonima.- Nel film di Frank Capra Accadde una notte (1934) il promesso sposo di Claudette Colbert atterra per le nozze nel prato della villa utilizzando un prototipo di elicottero (autogiro nella versione italiana).
L'elicottero nei videogiochi |
A partire dai primi videogiochi di guerra arcade degli anni 80, gli elicotteri sono comparsi spesso nei videogames, raramente come protagonisti; il primo è forse Microsoft Flight Simulator, (1982), che però includerà la possibilità di pilotare elicotteri solo negli anni 90 (con la versione '98). Tra i più famosi c'è la serie Comanche, Extreme Assault, Desert Storm (basata sul controllo in un Apache) e Desert Storm 2 e svariati altri.
L'inquinamento acustico |
I rumori troppo forti possono causare danni irreparabili all'apparato uditivo od alterazioni psicofisiche. Il suono viene misurato in decibel, con il fonometro. La soglia minima di udibilità è 20 decibel (rumore di una foglia che cade). Un suono superiore a 80 decibel viene considerato molesto o fastidioso.
Gli elicotteri, al pari degli aerei, generano un forte rumore. Molti studi sono stati fatti e vengono svolti per la riduzione del rumore e buoni risultati si sono ottenuti agendo sulle configurazioni dei rotori di coda. Il NOTAR, il Fenestron e le pale dei rotori di coda degli elicotteri moderni sono disegnate tenendo in gran conto la riduzione del rumore e delle vibrazioni, ricevendo una grossa spinta e finanziamenti dal mondo militare per il quale la furtività è un requisito molto importante.[35]
Case produttrici |
- Lista di produttori di elicotteri
- Lista di elicotteri
Note |
^ Robert Lemos, "The Helicopter: A Hundred Years of Hovering", sul sito Wired del 12 novembre 2007.
^ Greg Goebel, "Helicopter Origins", su Vectorsite del 1º giugno 2011.
^ Vite Aerea, 1483-1486, Codice Atlantico, foglio 83 v., Milano, Biblioteca Ambrosiana.
^ Catalogo collezioni - Macchina volante vite aerea - museoscienza, su www.museoscienza.org. URL consultato il 13 maggio 2016.
^ 1480: Leonardo Da Vinci's Helical Air Screw da Pilotfriend.com.
^ Vite aerea Archiviato il 29 marzo 2013 in Internet Archive. dal sito del Museo nazionale della scienza e della tecnologia Leonardo da Vinci.
^ abcdefghijklm Florian Ion Petrescu, Relly Victoria Petrescu, The Aviation History, BoD – Books on Demand, 2012, pp. 72-74, ISBN 978-3-8482-3077-8.
^ ab Giuseppe Mormino, La storia della prima elica, su Sapere, Ulrico Hoepli Editore, Data pubblicazione 15 novembre 1936, Anno II – Volume IV – n. 45. URL consultato l'8 dicembre 2008.
^ abc Museo nazionale della scienza e della tecnologia Leonardo da Vinci, Nuova area elicotteri (PDF), su museoscienza.org. URL consultato l'8 dicembre 2008.
^ (EN) Judy Rumerman, Early Helicopter Technology, U.S. Centennial of Flight Commission. URL consultato l'8 dicembre 2008 (archiviato dall'url originale il 21 agosto 2011).
^ AA. VV., Enciclopedia dell'Aviazione, Novara, EDIPEM, 1978, Vol. 3, pp. 62, 63.
^ (EN) J. Gordon Leishman, Bradley Johnson, Engineering Analysis of the 1907 Cornu Helicopter (PDF), Department of Aerospace Engineering Glenn L. Martin Institute of Technology University of Maryland, Data pubblicazione 17-11-2007. URL consultato l'8 dicembre 2008. Nel testo citato, il Dott. J. Gordon Leishman, una membro dell'AHS Fellow International, al 64° forum annuale della American Helicopter Society International, esprimeva dubbi sulle possibilità della macchina di Cornu, sostenendo che essa non aveva un motore di sufficiente potenza e un sistema di controllo tali da permetterle di sollevarsi dal terreno in volo libero.
^ (EN) Paul Cornu, U.S. Centennial of Flight Commission. URL consultato l'8 dicembre 2008 (archiviato dall'url originale l'8 aprile 2007).
^ AA. VV., Enciclopedia dell'Aviazione, Novara, EDIPEM, 1978, Vol. 5, p. 222.
^ "New Helicopter Rises in Vertical Flight." Popular Science, Novembre 1930, p. 70.
^ "Helicopter With Six Blades Succeeds In Tests." Popular Mechanics, March 1931.
^ Rumerman, Judy. "Helicopter Development in the Early Twentieth Century" Archiviato il 5 maggio 2012 in Internet Archive.. Centennial of Flight Commission. Retrieved 28 November 2007.
^ Munson Kenneth, Helicopters and other Rotorcraft since 1907, Londra, Blandford Publishing, 1968, ISBN 978-0-7137-0493-8.
^ ab Spenser 1998.
^ Umberto Anerdi, L'elicottero, una storia lunga cinque secoli, La Manovella, febbraio 2017
^ Watkinson John, Art of the Helicopter, Oxford, Elsevier Butterworth-Heinemann, 2004, p. 358, ISBN 0-7506-5715-4.
^ AA. VV., Enciclopedia dell'Aviazione, Novara, EDIPEM, 1978, Vol. 1, p. 101.
^ Virgilio Gavino, Ali ruotanti e ali battenti, su Sapere, Ulrico Hoepli Editore, Data pubblicazione 15 ottobre 1941, Anno VII – Volume XIV – Serie Seconda – n. 43/163. URL consultato l'8 dicembre 2008.
^ abc AA. VV., Enciclopedia dell'Aviazione, Novara, EDIPEM, 1978, Vol. 3, pp. 296-297.
^ AA. VV., Enciclopedia dell'Aviazione, Novara, EDIPEM, 1978, Vol. 5, pp. 218, 219.
^ Rapporto su incidente dovuto al power settling (PDF), Agenzia Nazionale per la Sicurezza del Volo, 8 aprile 2004. URL consultato il 26 aprile 2014 (archiviato il 27 settembre 2007).
^ STA - dispense - Autorotazione, su e-ser.eu. URL consultato il 16 aprile 2018.
^ {écita web|url= http://www.helipress.it/schede-604-elicotteri_duali_quando_il_mercato_civile_traina_lo_sviluppo_militare%7Ctitolo= Elicotteri duali, quando il mercato civile traina lo sviluppo militare|data= 28 ottobre 2014|accesso= 11 giugno 2018}}
^ (EN) L3 Communications WESCAM, su wescam.com. URL consultato l'8 dicembre 2008.
^ (EN) Celebrity Helicopters, Inc. web site, su celebheli.com. URL consultato l'8 dicembre 2008.
^ (EN) Movies - our helicopters available for movie Story Ship., Fury Helicopters. URL consultato l'8 dicembre 2008 (archiviato dall'url originale il 24 marzo 2008).
^ (EN) A.J. Vesak - Aerial Cinematographer .mw-parser-output .chiarimento{background:#ffeaea;color:#444444}.mw-parser-output .chiarimento-apice{color:red}
[collegamento interrotto], su ajvesak.com. URL consultato l'8 dicembre 2008.
^ (EN) Rotary Action - guide to helicopters in movies and television at rotaryaction.com, su Rotary Action.
^ (EN) index at rotaryaction.com - website of helicopters in movies and tv, su Rotary Action, Pigasus Press. URL consultato l'8 dicembre 2008.
^ B. Malovrh and F. Gandhi. Sensitivity of helicopter blade-vortex-interaction noise and vibration to interaction parameters. Journal of Aircraft, 42(3): 685-697, May-June 2005.
Voci correlate |
- Eliporto
- Elisuperficie
- Elicottero utility
- Elicottero antincendio
Altri progetti |
Altri progetti
- Wikiquote
- Wikizionario
- Wikimedia Commons
 Wikiquote contiene citazioni di o su elicottero
Wikiquote contiene citazioni di o su elicottero
 Wikizionario contiene il lemma di dizionario «elicottero»
Wikizionario contiene il lemma di dizionario «elicottero»
 Wikimedia Commons contiene immagini o altri file su elicottero
Wikimedia Commons contiene immagini o altri file su elicottero
Collegamenti esterni |
Elicottero, su Treccani.it, Istituto dell'Enciclopedia Italiana.
Elicottero, su thes.bncf.firenze.sbn.it, Biblioteca Nazionale Centrale di Firenze.
- (EN) Storia dell'elicottero, su centennialofflight.com.
- (EN) Lo sviluppo degli elicotteri all'inizio del Novecento, su centennialofflight.gov.
- (EN) U.S. ARMY HELICOPTER INFO, su tri.army.mil. URL consultato il 6 dicembre 2008 (archiviato dall'url originale il 25 maggio 2007).
- (EN) A GUIDE TO HELICOPTERS IN CINEMA & TELEVISION, su rotaryaction.com.
- Armamento Aereo - Contemporaneo, su libreriamilitare.com (archiviato dall'url originale il 2 luglio 2007).
- Registro elicotteri italiani ed altro ancora, su dgualdo.it.
- Gli elicotteri delle Forze Armate italiane, su alfonsomartone.itb.it.
- Elicottero, in Treccani.it – Enciclopedie on line, Istituto dell'Enciclopedia Italiana, 15 marzo 2011.
.mw-parser-output .navbox{border:1px solid #aaa;clear:both;margin:auto;padding:2px;width:100%}.mw-parser-output .navbox th{padding-left:1em;padding-right:1em;text-align:center}.mw-parser-output .navbox>tbody>tr:first-child>th{background:#ccf;font-size:90%;width:100%}.mw-parser-output .navbox_navbar{float:left;margin:0;padding:0 10px 0 0;text-align:left;width:6em}.mw-parser-output .navbox_title{font-size:110%}.mw-parser-output .navbox_abovebelow{background:#ddf;font-size:90%;font-weight:normal}.mw-parser-output .navbox_group{background:#ddf;font-size:90%;padding:0 10px;white-space:nowrap}.mw-parser-output .navbox_list{font-size:90%;width:100%}.mw-parser-output .navbox_odd{background:#fdfdfd}.mw-parser-output .navbox_even{background:#f7f7f7}.mw-parser-output .navbox_center{text-align:center}.mw-parser-output .navbox .navbox_image{padding-left:7px;vertical-align:middle;width:0}.mw-parser-output .navbox+.navbox{margin-top:-1px}.mw-parser-output .navbox .mw-collapsible-toggle{font-weight:normal;text-align:right;width:7em}.mw-parser-output .subnavbox{margin:-3px;width:100%}.mw-parser-output .subnavbox_group{background:#ddf;padding:0 10px}
.mw-parser-output .CdA{border:1px solid #aaa;width:100%;margin:auto;font-size:90%;padding:2px}.mw-parser-output .CdA th{background-color:#ddddff;font-weight:bold;width:20%}
| Controllo di autorità | LCCN (EN) sh85060007 · GND (DE) 4025993-6 |
|---|


